近日,段华伟课题组在机器人轨迹规划方向取得研究进展,相关研究成果以《A novel trajectory planning approach with torque and jerk constraints based on polynomial interpolation profile and adaptive iteration》为题发表在国际知名期刊《CIRP Journal of Manufacturing Science and Technology》(2025年第60卷)上。
该研究提出了一种新型轨迹规划方法,以“保守速度曲线构建-迭代优化提速”为核心框架,在考虑扭矩和加速度约束的前提下,通过多项式插值与自适应迭代,最终形成兼顾效率与安全性的机器人最优轨迹规划。与现有基于凸优化的方法相比,新方法能减少6.06%的路径遍历时间和77.4%的计算时间,且适用于6自由度机械臂的复杂几何路径,为机器人轨迹规划提供了一种新的解决方案。
本研究得到松山湖科技特派员项目资助(Grant No. 20234419-01KCJ-G),相关技术已申请国家发明专利。
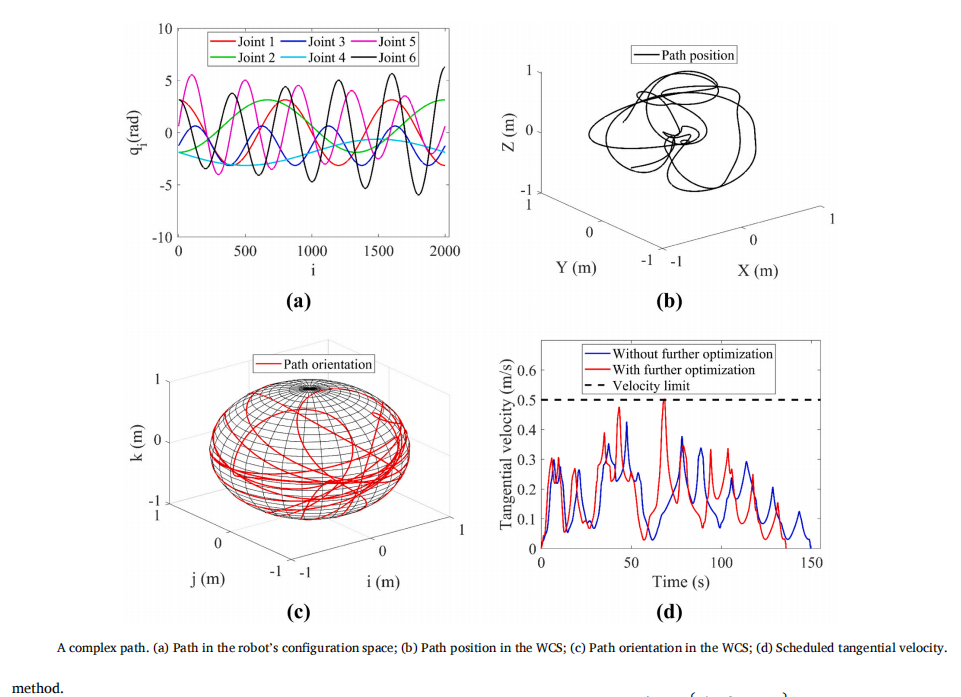
图1 论文相关插图